
I did a speed test with my Quadcopter V1. I was able to reach 78 km/h! It gives a good information about the headwind speed the quadcopter can handle.
There was no wind that day. At the maximum speed, we can see that the image is shaky. I think that it’s caused by the wind force applied on the GoPro which makes the gimbal dampers vibrate.
Flight setup:
- Frame: Self-designed
- Flight Controller: APM 2.5 (RCTimer)
- GPS: u-Blox CN06 Plus (RCTimer)
- Motors: T-Motor MT2216-12 V2 800KV
- ESC: Favourite Littlebee 30A (BLHeli)
- Props: Graupner E-Prop 9×5
- Battery: Zippy 4S 5000mAh 20C
- RC/TX: Graupner MX-16 HoTT / GR-16
- Video TX: ImmersionRC 5.8Ghz
- Camera: GoPro 3 Black
- Gimbal: DYS Smart3
- All up weight: 1.8 Kg
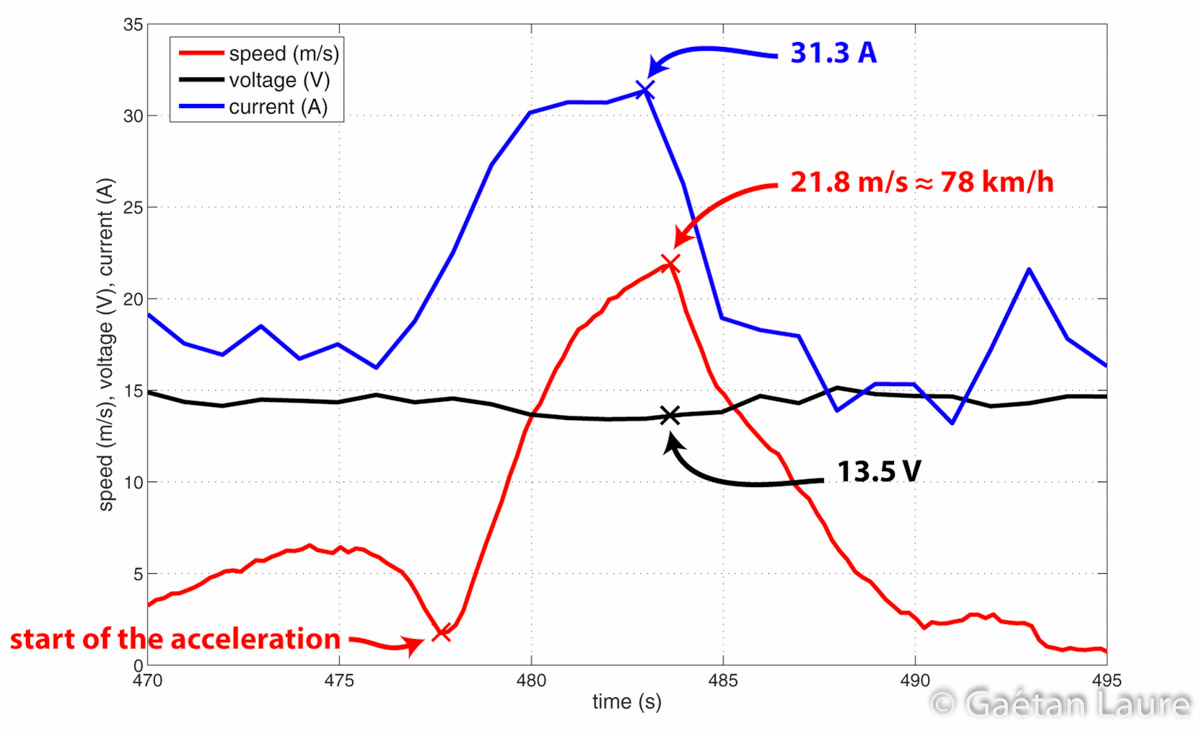
These curves show the GPS speed, the battery voltage and the current draw. These data were recorded on the APM board (dataflash logs).
The maximum speed (78 km/h) is reached after about 6 seconds acceleration. At the corresponding time, the current draw (31.3 A) is twice bigger than during hovering. The power draw reaches 31.3 A x 13.5 V ≈ 423 W. On the voltage curve, we can notice a voltage drop.
The speed never reached a constant value, it should be possible to go faster with the same propulsion chain (battery/ESCs/motors/props). But the mechanic parts might not handle such a speed.