
The first drone I ever built is a tricopter!
Tricopters are multirotors that only have three propellers. The way tricopters fly is a bit different from quadrotors. Since they have an odd number of rotors, they need the rear motor to be tilted by a servo to control the yaw.
Tricopters have some advantages over quadrotors:
- They are less costly to build, since they only need three motors and controllers.
- They have a wider space between the front arms (120 degrees) making them more appropriate for aerial photography (less likely to have props in the camera field of view).
- They feature a much better yaw control, making them more pleasant to fly.
But they have some drawbacks:
- They have no redundancy, they will inevitably crash in case of a motor failure.
- The "tilt mechanism" needed for the yaw control is a bit complex and fragile, making tricopters less reliable than quadrotors.
I built my tricopter with wooden arms, from the design shared by David Windestål on his website RCExplorer.se.
Setup specifications:
- Frame: David Windestål's Tricopter frame cut in a 1.5 mm G10/FR4 fiberglass sheet
- Arms: Square wooden booms (12x12x350 mm)
- Flight Controller: Quanton rev. 1 board (similar to OpenPilot Revolution board)
- Motors: T-Motor MT2216-12 V2 800KV
- Brushless Controllers (ESCs): T-Motor T30A
- Props: 9x5" from Hobbyking; but I rapidly moved for better quality ones: APC Slow Fly 10x4.7
- Servo motor (for the yaw axis control): Turnigy TGY-210DMH
- Battery: started with a 3S 2200mAh but I moved for a Zippy 4S 3000mAh 20C for more punch and longer flight time
- Radio Controller: Graupner MX16 Hott and GR-16 receiver
Let's show how I built it.
The first step is to cut the frame layout in a 1.5 mm fiberglass sheet.

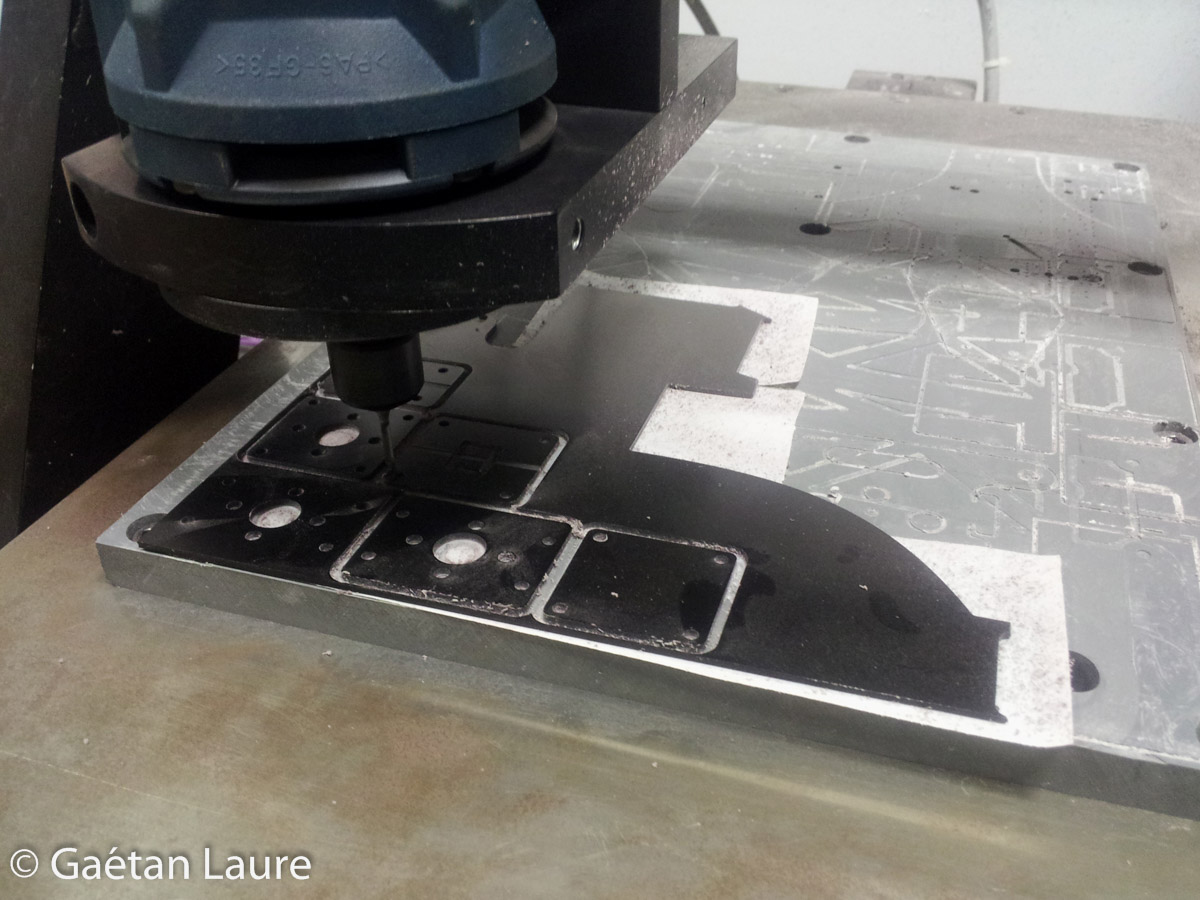
CNC cutting the frame and motor mount parts in a fiberglass sheet.

The frame parts cutted.

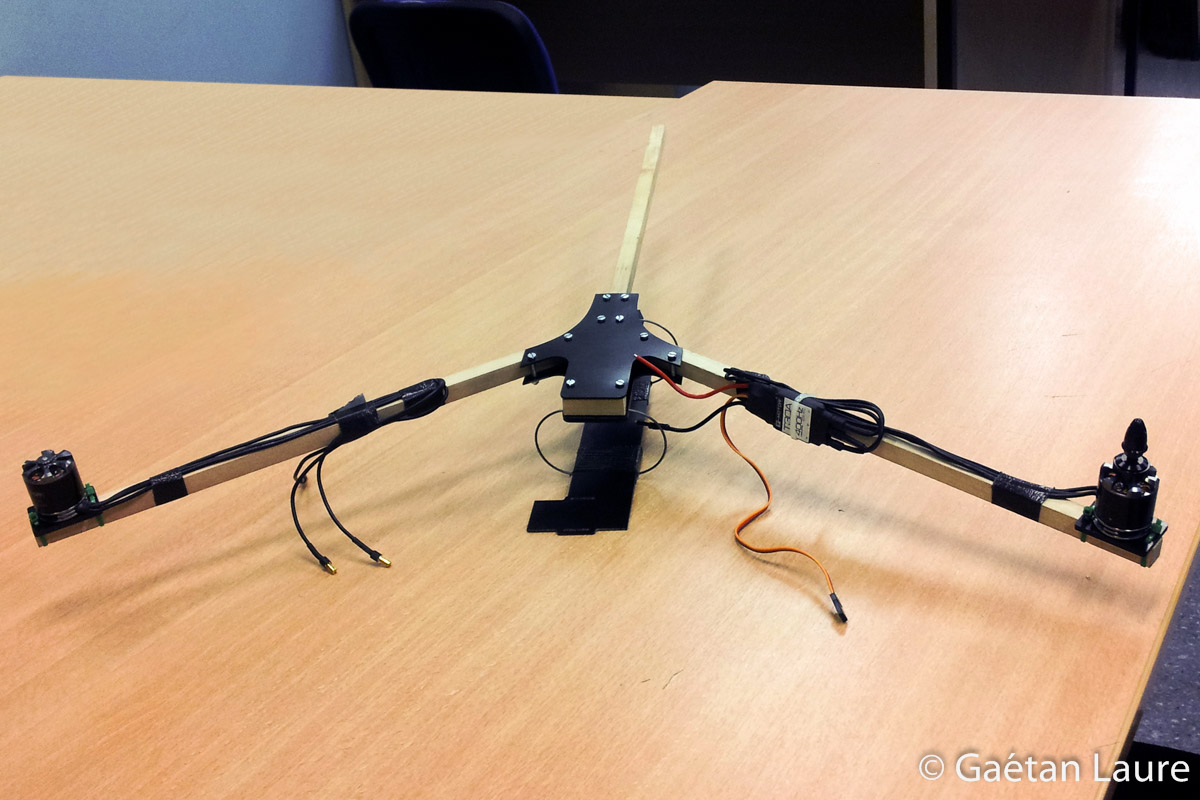
The frame assembled with wooden arms.

Arms can be folded up for easy transportation. It also prevents damage on the frame in case of a crash.
Mounting the motors and the battery tray.
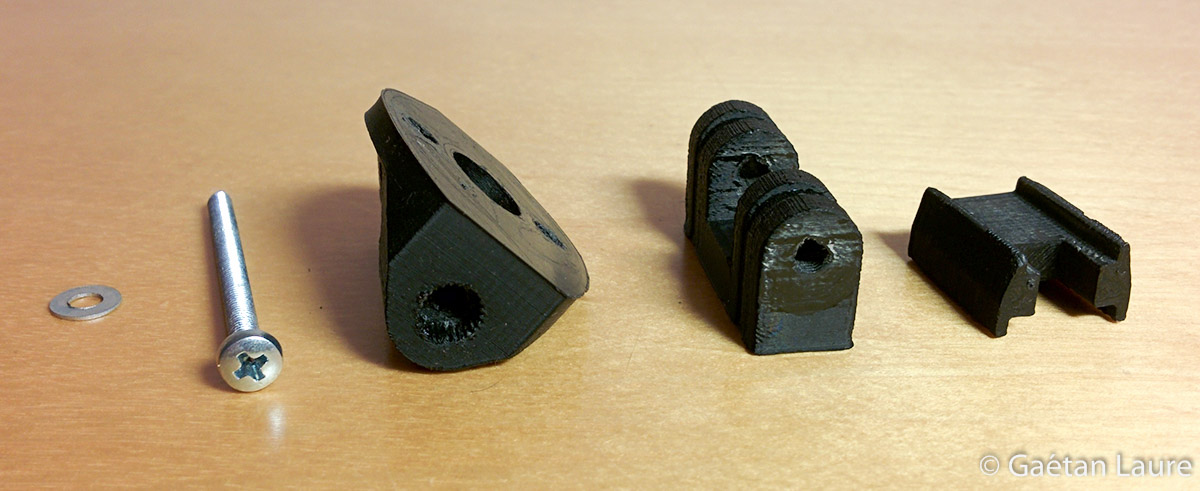
The 3D printed "tilt mechanism" to control the yaw axis. It has been designed by David Windestål (the CAD file is available on his website). It fit perfectly the servo motor, a Turnigy TGY-210DMH.

The tilt mechanism mounted on the back arm using zip-ties. Zip-ties act as a mechanical fuse to prevent damage in case of a crash.
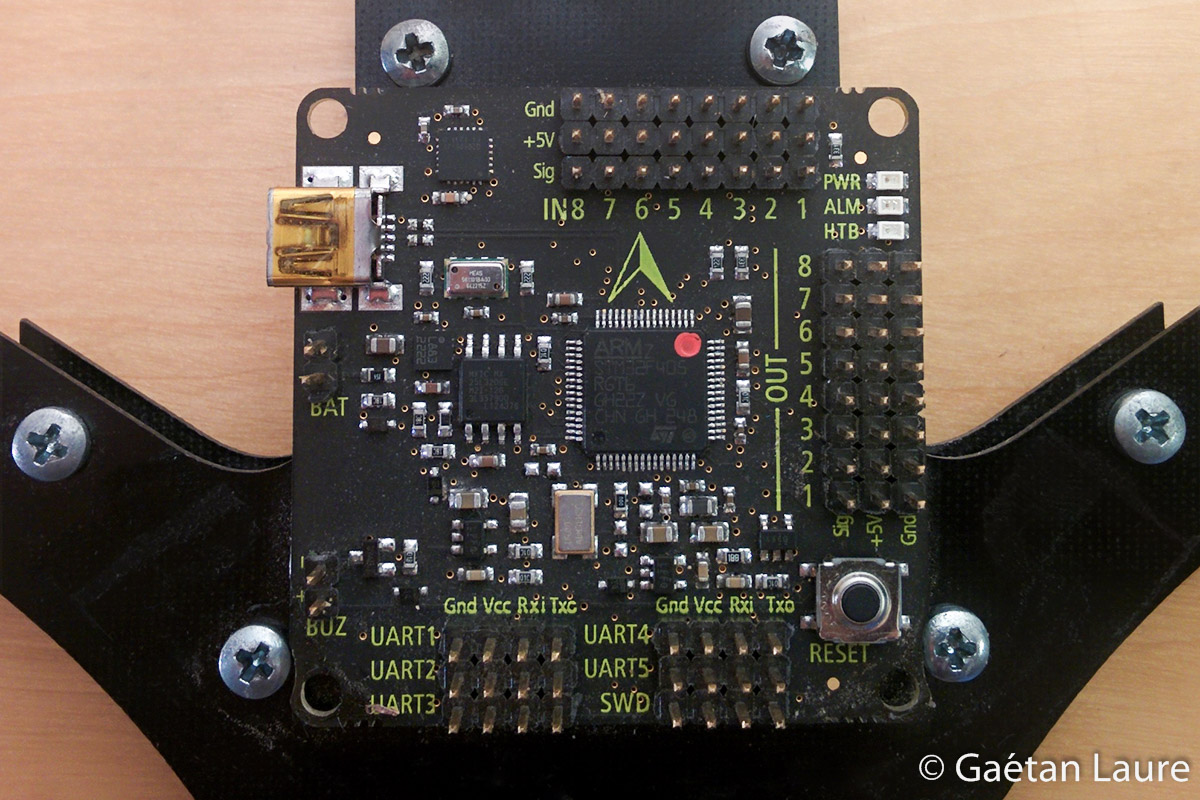
The flight controller used is the Quanton board (which is similar to the OpenPilot Revolution board). It runs Tau Labs's open source firmware.

The tricopter is fully mounted and ready to fly. It's time to try it out.

Flying the tricopter!

It's quite stable.


The tricopter flying while sunset in Toulouse!